- Главная
- О Группе компаний
- Продукты
- Безопасность
- Комплексная автоматизированная информационная система «Безопасный город»
- ПО потокового вещания видео и ведения архива «Медиасервер»
- ПО для создания распределенных систем IP-видеонаблюдения «SmartStation»
- Программно-аппаратный комплекс для создания систем видеонаблюдения «ТелеВизард-HD»
- ПО для создания систем видеонаблюдения «Компас»
- Здоровье
- Блокчейн
- Безопасность
- Наука
- Отзывы
- Контакты


Наука
Поиск |
Поиск оптимальных параметров алгоритма Lucas-KanadeПри публикации написать Статья опубликована в журнале Интеграция науки в современном мире. Сборник научных работ VI Международной научной конференции Евразийского Научного Объединения (г. Москва, июнь 2015). Ермолчев Алексей Юрьевич Задача трекинга – определение местоположения движущегося объекта (нескольких объектов) во времени с помощью камеры, является одной из самых часто возникающих задач в системах компьютерного зрения. Системы трекинга обычно используют модель движения, которая описывает, как может изменяться изображение целевого объекта при всевозможных различных его движениях. При всей кажущейся сложности, на практике зачастую достаточно найти смещения двумерных проекций объектов в плоскости кадра. При необходимости проследить смещение объекта относительно его положения на предыдущем кадре, в первую очередь, поможет оптический поток (optical flow). Описание алгоритмаОдин из самых широко используемых дифференциальных методов оценки оптического потока является метод Lucas-Kanade, основанный на частных производных сигнала [1–2].
Уравнение содержит две неизвестных переменных и не может быть однозначно разрешено. Алгоритм Lucas-Kanade обходит неоднозначность за счет использования информации о соседних пикселях в каждой точке. Метод основан на предположении, что в локальной окрестности каждого пикселя p значение оптического потока одинаково; таким образом, можно записать основное уравнение оптического потока для всех пикселей окрестности и решить полученную систему уравнений методом наименьших квадратов. Алгоритм Lucas-Kanade менее чувствителен к шуму на изображениях, чем поточные методы, однако является сугубо локальным и не может определить направление движения пикселей внутри однородных областей. Предположим, что смещение пикселей между двумя кадрами невелико. Рассмотрим пиксель p, тогда, по алгоритму Lucas-Kanade, оптический поток должен быть одинаков для всех пикселей, находящихся в окне с центром в p. А именно, вектор оптического потока
где Это уравнение может быть записано в матричной форме:
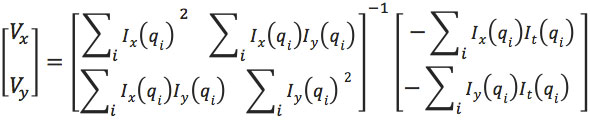
Полученную переопределенную систему решаем с помощью метода наименьших квадратов. Таким образом, получается система уравнений 2×2:
Необходимым условием для работы с алгоритмом трекинга Lucas-Kanade является выбор параметров – порога фильтрации точек, количества уровней пирамид, размера окна поиска на каждом уровне пирамиды и критерия прекращения итерационного алгоритма поиска – при которых будет наблюдаться оптимальное соотношение ошибки вычисления и времени работы алгоритма. В качестве алгоритма, используемого для проведения эксперимента — поиска оптимальных параметров — использовалась реализация алгоритма из библиотеки opencv. В данной библиотеке алгоритм Lucas-Kanade может быть запущен посредством вызова следующей С++ функции: void calcOpticalFlowPyrLK( InputArray prevImg, InputArray nextImg, InputArray prevPts, InputOutputArray nextPts, OutputArray status, OutputArray err, Size winSize=Size(21,21), int maxLevel=3, TermCriteria criteria= TermCriteria( TermCriteria::COUNT+TermCriteria::EPS 30, 0.01), int flags=0, double minEigThreshold=1e-4 ) Ниже приведено описание параметров, для которых в процессе проведения эксперимента предстоит выбрать оптимальные значения: - minEigThreshold. Алгоритм находит минимальное собственное значение матрицы пространственных градиентов уравнения оптического потока, поделенное на количество пикселей в окне поиска, и если это значение меньше, чем minEigThreshold, то соответствующая точка отфильтровывается, и ее оптический поток не обрабатывается, что позволяет удалить «плохие» точки и получить повышение производительности. - maxLevel. Если maxLevel установлен в 0, пирамиды не используется (один уровень), если установлен в 1, используется пирамида из двух уровней, и так далее. - winSize. Размер окна поиска на каждом уровне пирамиды. - criteria. Критерии прекращения итерационного алгоритма поиска (после указанного максимального числа итераций criteria.maxCount, или когда окно поиска станет меньше, чем criteria.epsilon). Задача эксперимента — определить, при каких значениях входных параметров minEigThreshold, maxLevel, winSize и criteria данный алгоритм будет иметь минимальную ошибку вычисления и минимальное время обработки на заданном множестве возможных значений параметров. Так как требование минимальной ошибки и минимального времени обработки противоречивы, то необходимо оптимальное соотношение между этими величинами. Таким образом, рассматриваемая задача – является задачей многокритериальной оптимизации. Сначала необходимо исказить изображения, чтобы создать выборку для исследования алгоритма трекинга. Алгоритм этих преобразований описан ниже:
В итоге получилось 10 выборок по 100 изображений в каждой. После применения аффинных преобразований вычисляются координаты точек: аналитически и с помощью алгоритм трекинга Lucas-Kanade. Для каждой пары точек ошибка вычислялась следующим образом: пусть
Ниже приведена общая последовательность действий по анализу значений параметров алгоритма трекинга:
В данном эксперименте:
В табл. 1 приведена часть результатов, полученных в процессе анализа значений параметров алгоритма трекинга.
Из данной таблицы необходимо было выбрать оптимальные параметры. Для этого был использован критерий Парето (Предположим, что рассматриваются два набора параметров, M и N. Говорят, что M доминирует N по Парето, если M не хуже N по всем критериям и хотя бы по одному критерию превосходит N. Если так оно и есть на самом деле, то, действительно, в выборе Nнет никакого смысла. Ведь M по всем параметрам не уступает, а по каким-то и выигрывает N [3]). В соответствии с данными критерием были выбраны следующие параметры: Для данных параметров с целью определить влияние параметра criteria на ошибку и среднее время работы алгоритма был проведён еще один эксперимент (см. Рис. 1-4).
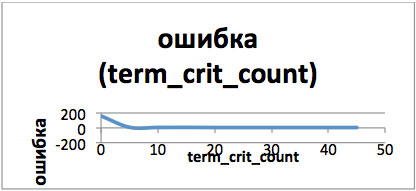
Рис. 1. Зависимость ошибки алгоритма от параметра term_crit_count
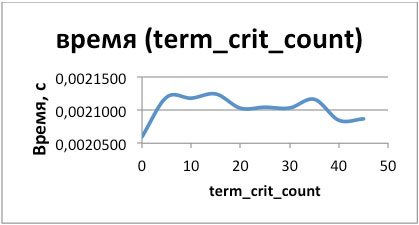
Рис. 2. Зависимость времени работы алгоритма от параметра term_crit_count
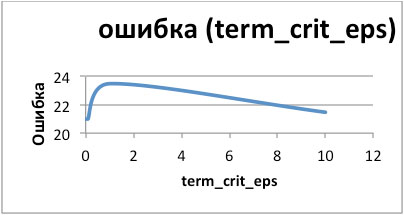
Рис. 3. Зависимость ошибки алгоритма от параметра term_crit_eps
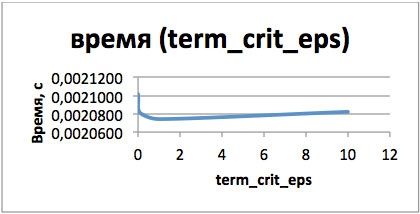
Рис. 4. Зависимость времени работы алгоритма от параметра term_crit_eps На рис.1 видно, что при значении параметра term_crit_count больше 5 величина ошибки стремится к нулю, тогда как закономерность изменения времени работы алгоритма от этого параметра (рис. 2) определить трудно. На рис. 3 показано, как изменяется ошибка в зависимости от изменения параметра term_crit_eps и видно, что при значении параметра больше 2 значение ошибки убывает, тогда как на рис. 4, где отображена зависимость времени работы алгоритма от этого же параметра, после значения 2 время, наоборот, возрастает. Таким образом, для решения задачи, описанной в данной работе, был проведён эксперимент, в ходе которого и были выявлены необходимые значения параметров алгоритма трекинга Lucas-Kanade, а для параметра criteria были построены графики, на которых можно увидеть зависимости ошибки и времени работы алгоритма от этого параметра. Список литературы
|