- Главная
- О Группе компаний
- Продукты
- Безопасность
- Комплексная автоматизированная информационная система «Безопасный город»
- ПО потокового вещания видео и ведения архива «Медиасервер»
- ПО для создания распределенных систем IP-видеонаблюдения «SmartStation»
- Программно-аппаратный комплекс для создания систем видеонаблюдения «ТелеВизард-HD»
- ПО для создания систем видеонаблюдения «Компас»
- Здоровье
- Блокчейн
- Безопасность
- Наука
- Отзывы
- Контакты


Наука
Поиск |
Принципы оптического метода автоматического детектирования лесных пожаров
Статья опубликована в журнале «Алгоритм Безопасности» №1, 2011г.
Ханин Александр Александрович
Чеботарев Роман Сергеевич ЗАО «Нордавинд»
Опыт прошедшего лета показал недостаточность мер, направленных на раннее обнаружение и своевременное тушение пожаров, что привело к их распространению на огромные площади, гибели людей и колоссальным материальным потерям. Климатические изменения последних лет и исследования в этой области свидетельствуют о том, что угрозы лесных пожаров в ближайшем будущем будут только возрастать. Становится очевидным, что активный мониторинг территории лесных массивов, раннее обнаружение очагов возгорания и оперативное информирование соответствующих служб являются актуальными задачами контроля пожарной безопасности. К сожалению, все эти задачи неразрешимы одновременно ни одним из используемых в настоящее время способом. Таким образом, существует острая необходимость создания качественно новой и эффективной технологии обнаружения очагов лесных пожаров на ранних стадиях возгорания. Краткое сравнение существующих методов1. Визуальный мониторинг
К преимуществам можно отнести высокую оперативность оповещения при наличии благоприятных погодных условий и возможность использования сохранившейся до сегодняшних дней инфраструктуры вышек. Недостатки данного способа очевидны – необходимость постоянного использования человеческих ресурсов в каждой точке расположения вышки в течение всего времени пожароопасного сезона и отсутствие возможности автоматизации процессов обнаружения и оповещения. 2. Авиационный мониторинг
К преимуществам данного способа можно отнести возможность контроля сколь угодно удаленных и труднодоступных территорий, а также возможность обнаружения низовых (скрытых пологом леса) и подземных пожаров. Недостатки способа определяются высокой стоимостью летного часа и невозможностью ведения постоянного мониторинга больших территорий, что может являться причиной позднего обнаружения пожара. Также стоит отметить сильную зависимость чувствительности регистрирующей аппара туры от широты обзора. Использование беспилотных летательных аппаратов может несколько снизить стоимость летного часа, однако не избавляет от риска несвоевременного обнаружения пожара. Кроме того, стоимость беспилотного летательного аппарата может достигать миллиона долларов США. 3. Спутниковый мониторинг
Сильными сторонами данного способа являются возможность контроля любых участков местности, включая труднодоступные и недоступные для человека, а также высокая степень автоматизации процесса получения и обработки данных. Недостатков же существенно больше. Во-первых, требуемая для его достоверного обнаружения площадь возгорания, как правило, составляет не менее 1 гектара, что делает обнаружение пожара на ранней стадии не просто затруднительным, а практически невозможным. Во-вторых, сильное влияние метеоусловий – облачность и сильный ветер могут привести к задержкам или даже невозможности обнаружения пожара, что помимо повышения угрозы от пожара увеличивает стоимость его ликвидации. Кроме того, недостаточна оперативность самого процесса мониторинга и передачи данных (до 4 раз в сутки). Не стоит забывать и о дороговизне ввода спутника в эксплуатацию – заоблачная стоимость доставки на околоземную орбиту килограмма полезного груза с учетом перечисленных выше недостатков ставит под сомнение целесообразность спутникового мониторинга. 4. Видеомониторинг
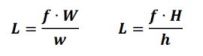
К преимуществам данного способа можно отнести все преимущества визуального мониторинга, а также минимизацию человеческих ресурсов, задействованных в процессе мониторинга. И, пожалуй, очень важное достоинство – определение возгорания на достаточно ранних стадиях. При этом стоит помнить, что можно зафиксировать только такой пожар, который возможно обнаружить визуально. С учетом сравнительного анализа описанных выше методов детектирования лесных пожаров в условиях нашей страны видеомониторинг является наиболее оптимальным решением и обладает наибольшим потенциалом автоматизации. Предложенный ниже метод является следующей ступенью эволюции классического видеомониторинга лесных массивов. Постановка задачиПеред тем, как перейти к сути предлагаемого метода, следует выявить ограничения классического видеомониторинга. Как быть в случае необходимости контроля обширных территорий площадью в тысячи и сотни тысяч гектаров? Следует заметить, что указанные цифры являются наиболее близкими к реальности – развертывание системы видеомониторинга для участка лесного массива площадью в несколько сотен гектаров, просто нецелесообразно. Наращивание штата специально обученных операторов является заведомо тупиковым путем. Ведь, как известно, слабым местом любой системы видеонаблюдения является оператор, эффективность работы которого уменьшается с возрастанием количества видеокамер, вверенных ему для контроля. Кроме того, оператору присуща утомляемость из-за необходимости контроля за однообразными слабоменяющимися сценами и другие свойственные человеку недостатки (возможность отсутствия на рабочем месте в нужный момент и т.п.). Таким образом, первым шагом к построению эффективной системы мониторинга лесных массивов должна быть минимизация влияния человеческого фактора посредством автоматизации обработки потоков видеоинформации, поступающей с видеокамер. Другими словами, необходим алгоритм оптического обнаружения признаков возгорания. Описание способаОптический метод детектирования был разработан авторами данной статьи. Алгоритм обработки видеопотока в реальном времени позволяет с высокой вероятнотью обнаруживать признаки возгорания – дым и огонь – на наблюдаемой сцене, эффективно отрабатывая и отбрасывая такие псевдопризнаки пожаров, как туман или движение низко стелющихся облаков. Несмотря на то, что подавляющее большинство лесных пожаров возникает днем, система позволяет обнаруживать очаг возгорания и в условиях плохой освещенности – используемые алгоритмы являются адаптивными и инвариантными к условиям освещенности. Благодаря данной технологии оператор освобождается от необходимости постоянного наблюдения за пожарной обстановкой – система будет автоматически информировать его только о подозрительных ситуациях, требующих его внимания и участия. Рассмотрим устройство и основные принципы действия системы. Каждая вышка оснащается тремя обзорными высокочувствительными видеокамерами с широкоугольными объективами фиксированного фокусного расстояния таким образом, что суммарный угол обзора составляет 360°, и камерой с трансфокатором (объектив с дистанционно изменяемым фокусным расстоянием), установленной на поворотное устройство, а также малогабаритным вычислителем и устройством связи. Система обзорных камер предназначена для панорамного обзора территории лесных массивов с целью первичного выявления подозрительных областей – предполагаемых очагов возгорания в автоматическом режиме. На данном этапеобрабатывается весь кадр быстрым алгоритмом, маркирующим границы зон интереса.Далее для каждой маркированной области формируется простой дескриптор, позволяющий численно оценить степень опасности каждой области и на раннем этапе отсеивать определенно ложных кандидатов. После выявления самого вероятного кандидата в очаги возгорания в дело вступает поворотная камера с моторизованным объективом: направление оптической оси корректируется по азимуту и возвышению до совпадения с центром масс и условия оптимального размещения объекта интереса в кадре. При зафиксированном положении поворотной камеры на серии кадров вычисляется комплексный дескриптор многомасштабных признаков, учитывающий как контурные, текстурные, так и поведенческие характеристики объекта интереса (подробности об устройстве и методе построения дескриптора по понятным причинам приводить не будем). По результатам последующего постпроцессинга серии дескрипторов формируется структура результата, содержащая вероятность наличия очага возгорания в анализируемой зоне, а также комплекс параметров, в полной мере описывающих объект, подозрительную область, которые потребуются для работы логики верхнего уровня, и возможности верификации результата с данными, полученными с соседних вышек. Следует отметить, что первичный анализ видеопотока на предмет присутствия предположительных очагов возгорания и их верификация производится малогабаритным вычислителем. Сигнал о возможном присутствии признаков возгорания в секторе контроля вышки передается через сеть ретрансляторов (каждая вышка сама является ретранслятором) в ситуационный вычислительный центр. В ситуационном центре проводится автоматический детальный многоуровневый анализ данных, полученных с одной или серии вышек, и формирование резолюции системы – присутствует ли на контролируемой территории возгорание, и в случае положительного ответа приблизительные координаты очага возгорания. Именно «приблизительные», так как используется гипотеза расположения вышек на плоскости и допущение о том, что все видеосенсоры размещены на одной высоте. Естественно, чем большее число вышек детектировало очаг возгорания, тем точнее можно определить положение очага возгорания. Но, пожалуй, хватит теории. Ниже рассмотрим решение в общем виде некоторых, на наш взгляд, интересных задач, с которыми приходится сталкиваться при проектировании эффективной распределенной системы мониторинга пожарной обстановки лесных массивов и моделирования ее работы. Расчет эффективного радиуса обзора системыПеред тем, как перейти к более интересной задаче выбора оптимального размещения группы вышек в квадрате заданной стороны, выведем формулы расчета эффективного радиуса обзора системы. Постараемся определить соотношения между параметрами видеокамеры и вышки. Будем исходить из предположения, что нам необходимо достоверно обнаружить очаг возгорания площадью от 100 м2. Предполагая, что форма очага близка к кругу, получаем диаметр очага чуть больше 11 м. Алгоритмы обнаружения признаков возгорания, разработанные авторами, позволяют с высокой степенью достоверности определять возгорания при его ширине 15% от ширины кадра. Известно, что между размерами матрицы и физическими размерами зоны наблюдения существуют следующие отношения:
где:
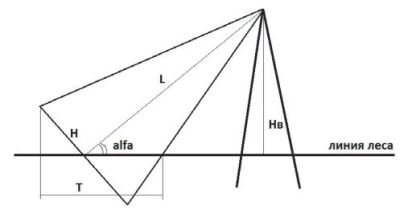
Из полученных формул видно, что необходимо искать компромисс между максимальным углом обзора (достигается при максимальном H и минимальном f) и максимальной протяженностью зоны контроля (наоборот, достигается при максимальном f). Также необходимо учитывать, что камера будет установлена под некоторым углом alfa к горизонту, зависящим от высоты вышки над уровнем леса (рис. 1).
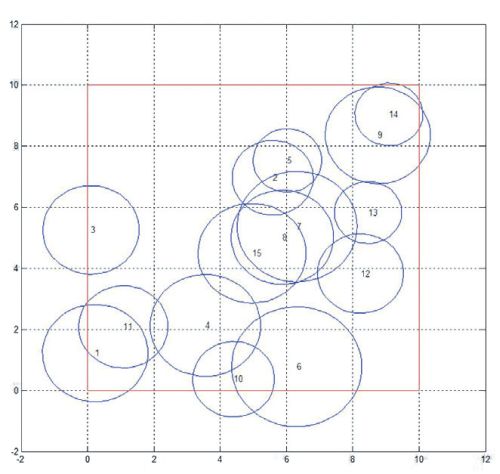
Итак, варьируя указанными параметрами и выполняя элементарные геометрические расчеты, можно добиться максимальной протяженности зоны контроля при известных ограничениях разрешающей способности матрицы. Оптимизация расположения группы вышекОдной из непростых проблем, с которой можно столкнуться при проектировании распределенной системы вышек, является задача оптимального размещения заданного числа вышек на заданной площади. Рассмотрим следующий непростой случай. Предположим, имеется квадрат лесного массива со стороной a, на котором необходимо разместить N вышек, причем в общем случае эффективный радиус обзора каждой вышки может варьироваться в некоторых пределах. Требуется добиться максимально возможной площади покрытия вышек. При этом, вышки должны оставаться на внутри ограниченной территории лесного массива. Фактически, чтобы добиться максимальной площади покрытия, необходимо минимизировать площади участков перекрытия зон действия вышек, которые будем вычислять как пересечения пар кругов. Функция пересечения площадей кругов является нелинейной, а размещение вышек ограничено квадратом определенной стороны, поэтому проблема сводится к решению задачи нелинейного программирования. Моделирование будем проводить в среде MathWorks MATLAB (r2010a), используя набор средств Optimization Toolbox. На рис. 2 приведена нулевая итерация процесса оптимизации положения 15 объектов, координаты выбраны случайным образом. Каждая вышка обозначена окружностью синего цвета с номером в центре, участок лесного массива ограничен красным цветом. Обратите внимание, что зоны покрытия большинства вышек перекрываются, при этом некоторые из них выходят за пределы допустимой территории. В процессе оптимизации будем варьировать значения пары координат вышки внутри ограниченной области, добиваясь максимальной площади покрытия. Так как в рассматриваемом примере 15 вышек, имеем 30 переменных для оптимизации.
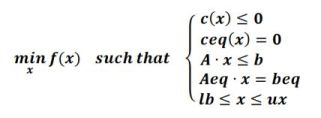
Для решения задачи будем использовать нелинейный решатель, способный работать с нелинейными функциями (минимум площади пересечения) в заданных ограничениях (ограниченная территория):
где:
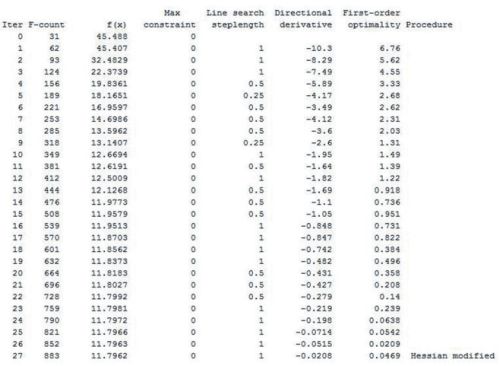
Указываем целевую функцию, ограничения, отправную точку и любые значения, необходимые целевой функции, не равные значениям по умолчанию. Выбрав допуски для стандартного алгоритма Левенберга-Марквардта, будем выводить результаты, полученные на каждой новой итерации в командной строке, чтобы видеть прогресс (табл. 1).
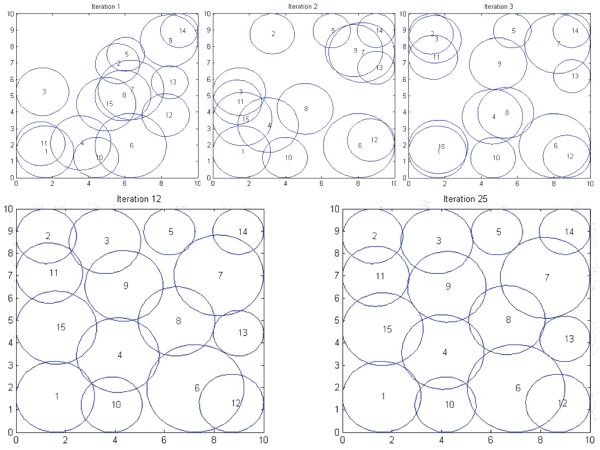
Отобразим в графическом виде результат некоторых промежуточных итераций (рис. 3). Первые три изображения соответствуют ранним итерациям, остальные – промежуточной и конечной.
В итоге мы получаем массив пар координат (x, y) оптимальным образом расположенных вышек системы мониторинга пожарной обстановки. Моделирование поведения системы в условиях пожара
Дабы не перегружать читателя сложными математическими выкладками, приведем более простой пример – модель Дросселя и Швабла (1992 г.), определенную четырьмя одновременно выполняющимися условиями:
определяющее среднее число не охваченных огнем деревьев между двумя пожарами. Для того, чтобы модель имела физический смысл и ее можно было использовать, должны выполняться следующие условия для кластеров (кластер – когерентное множество ячеек, находящихся в одинаковом состоянии):
где Ts max – время выгорания наибольшего кластера. Первое условие f << p позволяет крупным структурам развиваться, в то время как второе условие – p << Ts max – не позволяет деревьям появляться вблизи горящего кластера. Ценность описанных выше моделей заключается в том, что они могут быть положены в основу методик отработки и калибровки поведения распределенной группы пожарных вышек, тем самым существенно повысить готовность системы к реальным случаям возникновения пожаров. ЗаключениеВ ближайшие два года в рамках реализации федеральной целевой программы (ФЦП) «Пожарная безопасность в Российской Федерации на период до 2012 года» планируется создать Системы обнаружения крупных лесных и техногенных пожаров и мониторинга обстановки в пострадавших районах. Описанный в статье подход к обнаружению лесных пожаров может с успехом применяться для контроля лесных массивов любой протяженности и обнаружения очагов возгорания на ранней стадии. Но, помимо систем раннего обнаружения лесных пожаров, не менее важным является вопрос разработки автоматизированных систем оперативного управления пожарными подразделениями, в том числе модернизации всей системы связи при тушении пожаров. Таким образом, требуется мобилизация всех инстанций и объединение усилий специалистов из всех смежных областей, ведь решение задачи предотвращения лесных пожаров является не просто приоритетной, а критически важной для национальной безопасности России.
|
 При визуальном обнаружении пожара наблюдатель с помощью азимутального круга определяет направление на пожар и сообщает это направление в центр контроля с помощью средств связи. Из центра контроля производится определение, с какой еще вышки может быть обнаружен этот пожар, и производится связь с другим наблюдателем, который также обнаруживает пожар и определяет направление на него. После чего в центре контроля, используя известные направления с вышек на пожар, с помощью карты определяют местонахождение предполагаемого пожара и предпринимают меры для его ликвидации.
При визуальном обнаружении пожара наблюдатель с помощью азимутального круга определяет направление на пожар и сообщает это направление в центр контроля с помощью средств связи. Из центра контроля производится определение, с какой еще вышки может быть обнаружен этот пожар, и производится связь с другим наблюдателем, который также обнаруживает пожар и определяет направление на него. После чего в центре контроля, используя известные направления с вышек на пожар, с помощью карты определяют местонахождение предполагаемого пожара и предпринимают меры для его ликвидации. Пилот на летательном аппарате (самолет, вертолет), оснащенном сканирующим теплолокатором микроволнового диапазона и инфракрасными датчиками, с определенной периодичностью совершает облет пожароопасной территории. При обнаружении пожара производится определение его координат с их последующей передачей в центр контроля.
Пилот на летательном аппарате (самолет, вертолет), оснащенном сканирующим теплолокатором микроволнового диапазона и инфракрасными датчиками, с определенной периодичностью совершает облет пожароопасной территории. При обнаружении пожара производится определение его координат с их последующей передачей в центр контроля. Специализированные спутники, находящиеся на негеостационарных орбитах, производят снимки земной поверхности в инфракрасном диапазоне при помощи так называемых радиометров с последующей передачей их на наземную станцию для детального анализа. На основе разности температуры поверхности земли и температуры очага возгорания возможно определить его приблизительное местоположение.
Специализированные спутники, находящиеся на негеостационарных орбитах, производят снимки земной поверхности в инфракрасном диапазоне при помощи так называемых радиометров с последующей передачей их на наземную станцию для детального анализа. На основе разности температуры поверхности земли и температуры очага возгорания возможно определить его приблизительное местоположение. Видеомониторинг является логическим развитием и первой ступенью автоматизации визуального мониторинга. При данном способе контроля вместо людей на вышках используется комплекс видеосенсоров, включающий в себя как подсистему обзорных видеокамер, так и подсистему поворотных видеокамер, оснащенных моторизованными объективами (трансфокаторами). Каждая вышка оснащается устройством связи с ситуационным центром, где оператор может наблюдать сразу за несколькими камерами. При обнаружении пожара оператор также имеет возможность получить подтверждение с другой ближайшей камеры. Возможность получения текущих азимутальных координат положения поворотных устройств позволяет при помощи простых расчетов с достаточной точностью определять координаты очага возгорания на двухмерной карте местности.
Видеомониторинг является логическим развитием и первой ступенью автоматизации визуального мониторинга. При данном способе контроля вместо людей на вышках используется комплекс видеосенсоров, включающий в себя как подсистему обзорных видеокамер, так и подсистему поворотных видеокамер, оснащенных моторизованными объективами (трансфокаторами). Каждая вышка оснащается устройством связи с ситуационным центром, где оператор может наблюдать сразу за несколькими камерами. При обнаружении пожара оператор также имеет возможность получить подтверждение с другой ближайшей камеры. Возможность получения текущих азимутальных координат положения поворотных устройств позволяет при помощи простых расчетов с достаточной точностью определять координаты очага возгорания на двухмерной карте местности.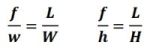
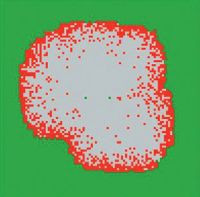 Реальную эффективность описанной системы детектирования может подтвердить лишь опыт многолетней эксплуатации ряда подобных систем. Но тем не менее немаловажным моментом является математическое моделирование поведения распределенной системы в ситуации возникновения одного или нескольких очагов возгорания. Создание модели даже с большим числом допущений может позволить выявить ряд узких мест системы и устранить их перед вводом комплекса в эксплуатацию. Авторами была развита теория из области прикладной математики, связанная с моделированием сложных динамических систем. Модель является продолжением классического клеточного автомата и определена на сетке с Ld ячейками, где L – стороны области, а d – ее размерность. Каждая ячейка имеет три состояния – пусто, дерево, огонь. Поведение клеточного «леса» полностью описывается набором нескольких правил, которые и определяют законы возникновения очагов возгорания и распространения огня.
Реальную эффективность описанной системы детектирования может подтвердить лишь опыт многолетней эксплуатации ряда подобных систем. Но тем не менее немаловажным моментом является математическое моделирование поведения распределенной системы в ситуации возникновения одного или нескольких очагов возгорания. Создание модели даже с большим числом допущений может позволить выявить ряд узких мест системы и устранить их перед вводом комплекса в эксплуатацию. Авторами была развита теория из области прикладной математики, связанная с моделированием сложных динамических систем. Модель является продолжением классического клеточного автомата и определена на сетке с Ld ячейками, где L – стороны области, а d – ее размерность. Каждая ячейка имеет три состояния – пусто, дерево, огонь. Поведение клеточного «леса» полностью описывается набором нескольких правил, которые и определяют законы возникновения очагов возгорания и распространения огня.